Research Knowledge Bases
Hello! The above video demo is a bit outdated, but a new preview will be available soon!
(Unfortunately Unity has prevented me from uploading playable MVP’s on account of age).
What will be in the new preview?
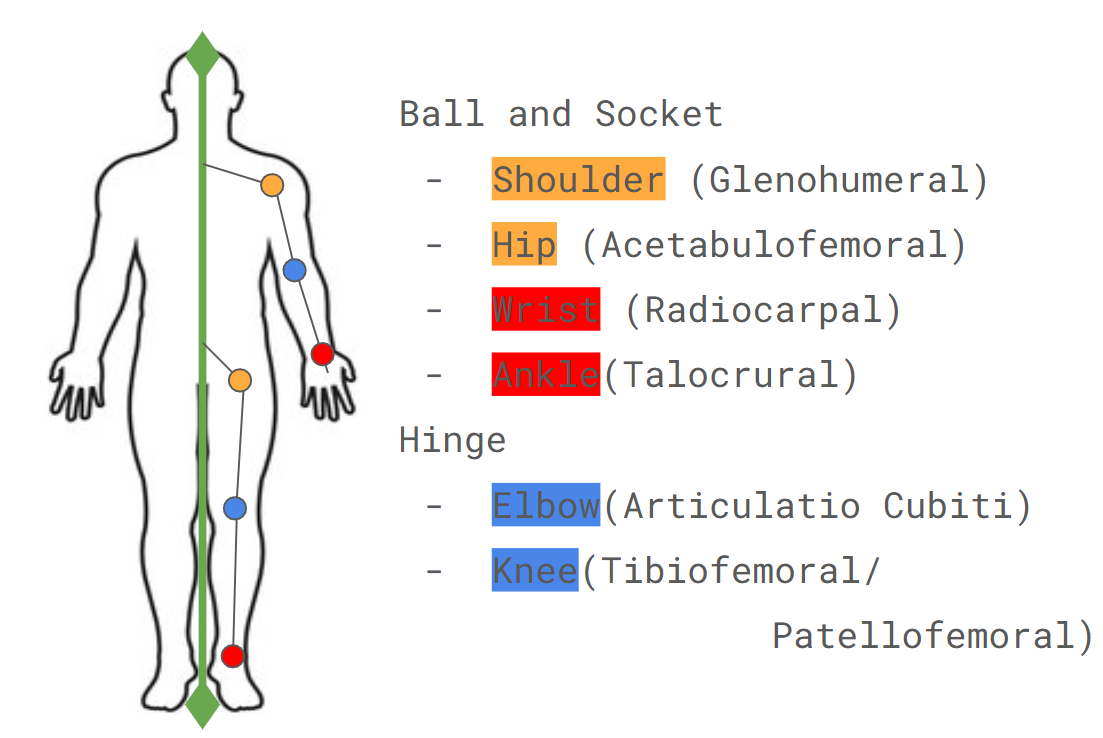
Anatomically accurate (and shockingly expensive) body model with explicit pictures of moment arms and how they are measured
Vector visualizations and graphing for data analysis
Further complex motion (gimbal lock /axial conflation is problematic for ball/socket joint movement
What other than that will be in the full, published BioMachina v1?
Full incorporation of all the studies in the knowledge base documents
“Easy Mode” which will simplify motions and study interpretations for those new to biomechanics
How do the physics of this project work?
Vectors drawn from superior to inferior joints (or to bodily axis) are repeatedly multiplied to find the time in the joint-angle range of motion where the external moment arm peaks. The direction vector for motion is then multiplied with template vectors to find the path it most closely matches (peak dot product).
Based on the limb’s direction of movement, the angle at the time of peak external moment is cross referenced with anatomical studies on internal moment arms. Using neuromechanical matching, we then determine the muscle receiving the greatest relative stimulus.
Contact: lmaridgefield@icloud.com or machinabiodev@gmail.com for updated information about biomachina.